
Welcome to the SOPS Lab
SOPS gives us a general framework with which to study programmable matter to inform on a wide spectrum of systems in our world.
About Us
Who are we?
We’re an interdisciplinary team of researchers collaborating across three universities to better understand the algorithmic and physical underpinnings that drive collective behavior, such as schooling in fish, and rafting/bridging in ant colonies. We are specifically interested in how these naturally occurring emergent phenomena can be applied to programmable matter, or physical materials which can autonomously change their properties as a reaction to their surroundings. Combining our expertise in distributed algorithms, stochastic processes, robotics, and soft matter, we study programmable matter systems both from the perspective of theory/proofs as well as modeling, simulation, and physical experiments.
What is “SOPS”?
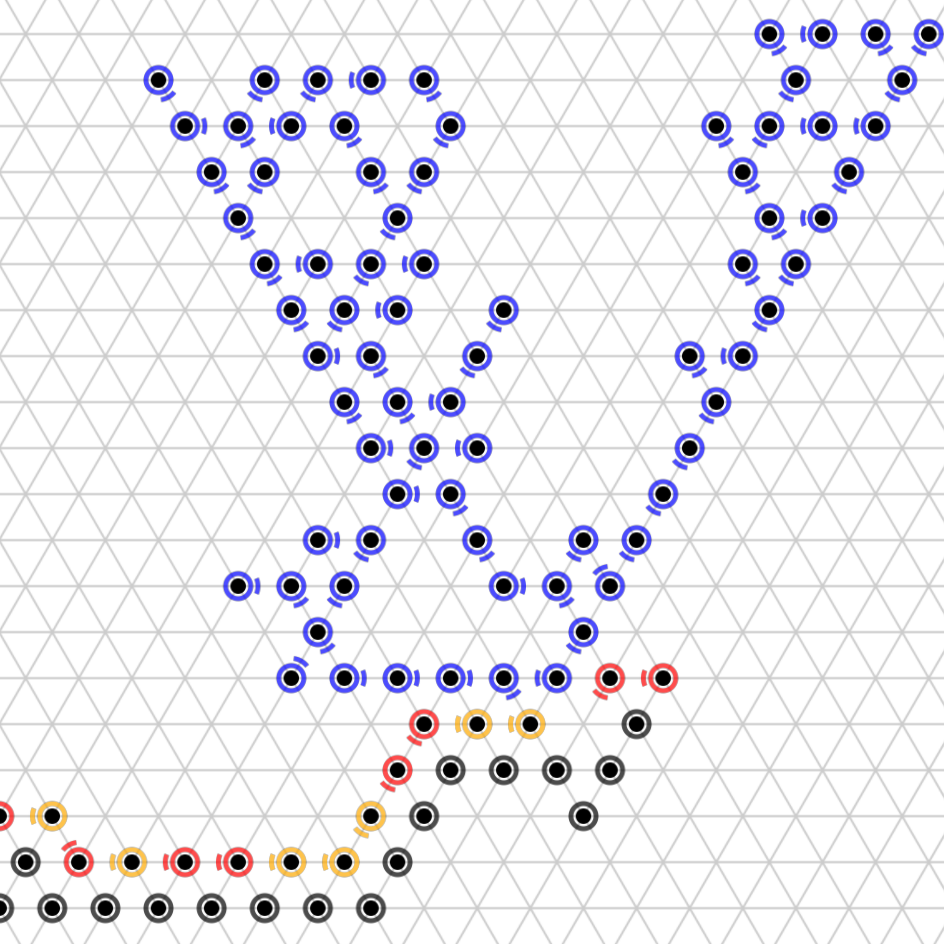
Self-Organizing Particle Systems, or SOPS for short, is an abstraction of programmable matter. One can imagine a system of programmable matter as a multitude of tiny, simple computational units (or “particles”) all working together to achieve large-scale behaviors like changing the system’s shape, self-healing after wear and tear, or coating another surface for cosmetic or sensing purposes. As an abstraction, SOPS gives us a general framework with which to study programmable matter, and the results we obtain can inform a wide spectrum of systems one may hope to implement in the future.
Research
SOPS
Investigating self-organizing particle systems under the amoebot model from the perspective of distributed computing theory.
(Arizona State U. & Paderborn U.)
Emergence
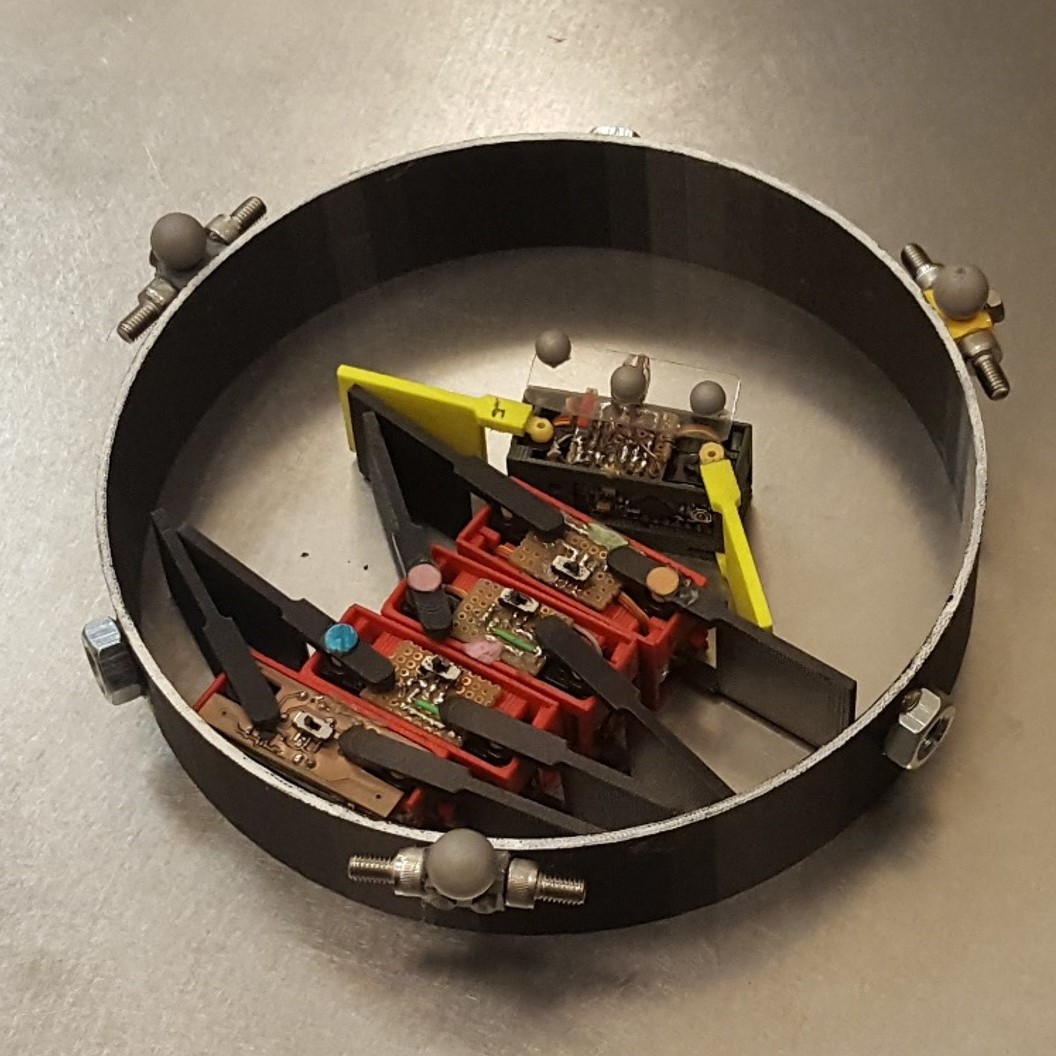
Harnessing the power of phase transitions and Markov chain analysis to induce emergent behavior in simple, analog robots.
(Arizona State U., Georgia Tech, MIT, Northwestern U.)
Network Algorithms and Distributed Optimization
Designing approximation algorithms for hard network optimization problems with provable guarantees.
(Arizona State U., TU Berlin, UIUC)